MHT CET · Physics · Rotational Motion
In case of rotational dynamics, which one of the following statements is correct?
\([\vec{\omega}=\) angular velocity, \(\vec{v}=\) linear velocity
\(\overrightarrow{\mathrm{r}}=\) radius vector, \(\vec{\alpha}=\) angular acceleration
\(\overrightarrow{\mathrm{a}}=\) linear acceleration, \(\overrightarrow{\mathrm{L}}=\) angular momentum
\(\overrightarrow{\mathrm{p}}=\) linear momentum, \(\vec{\tau}=\) torque,
\(\overrightarrow{\mathrm{f}}=\) centripetal force \(]\)
- A \(\overrightarrow{\mathrm{v}}=\overrightarrow{\mathrm{r}} \times \vec{\omega}, \vec{\alpha}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{a}}, \overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{p}}, \vec{\tau}=\) \(\overrightarrow{\mathrm{f}} \times \overrightarrow{\mathrm{r}}\)
- B \(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}, \vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}, \overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{p}} \times \overrightarrow{\mathrm{r}}, \vec{\tau}=\) \(\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
- C \(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}, \vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}, \overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{p}}, \vec{\tau}=\) \(\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
- D \(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}, \vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}, \overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{p}} \cdot \overrightarrow{\mathrm{r}}, \vec{\tau}=\) \(\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
Answer & Solution
Correct Answer
(C) \(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}, \vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}, \overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{p}}, \vec{\tau}=\) \(\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
Step-by-step Solution
Detailed explanation
Linear velocity \(\overrightarrow{(\mathrm{v})}\) :
The linear velocity of a point in rotational motion is given by the cross product of the angular velocity vector \((\vec{\omega})\) and the radius vector \(\overrightarrow{(r)}\) :
\(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}\)
This shows the perpendicular relationship between linear velocity and both the radius vector and the angular velocity.
Angular acceleration (\(\vec{\alpha}\)):
The angular acceleration and its relation to linear acceleration can often be represented with:
\(\vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}\)
Though, if specified to mean tangential component in a circular path, it directly relates to the tangential acceleration.
Angular momentum \((\overrightarrow{\mathrm{L}})\) :
The angular momentum of a particle with respect to a point is defined as:
\(\overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{p}}\)
where \(\overrightarrow{\mathrm{p}}\) is the linear momentum (\(m v\)) of the particle.
Torque \((\vec{\tau})\) :
Torque is defined as the cross product of the radius vector \(\overrightarrow{(r)}\) and the force vector \(\overrightarrow{(\mathbf{f})}\) :
\(\vec{\tau}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
This defines the rotational effect of a force applied at a distance from a pivot.
Each component is consistent with the right-hand rule and the classical definitions in rotational dynamics.
The linear velocity of a point in rotational motion is given by the cross product of the angular velocity vector \((\vec{\omega})\) and the radius vector \(\overrightarrow{(r)}\) :
\(\overrightarrow{\mathrm{v}}=\vec{\omega} \times \overrightarrow{\mathrm{r}}\)
This shows the perpendicular relationship between linear velocity and both the radius vector and the angular velocity.
Angular acceleration (\(\vec{\alpha}\)):
The angular acceleration and its relation to linear acceleration can often be represented with:
\(\vec{\alpha}=\overrightarrow{\mathrm{a}} \times \overrightarrow{\mathrm{r}}\)
Though, if specified to mean tangential component in a circular path, it directly relates to the tangential acceleration.
Angular momentum \((\overrightarrow{\mathrm{L}})\) :
The angular momentum of a particle with respect to a point is defined as:
\(\overrightarrow{\mathrm{L}}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{p}}\)
where \(\overrightarrow{\mathrm{p}}\) is the linear momentum (\(m v\)) of the particle.
Torque \((\vec{\tau})\) :
Torque is defined as the cross product of the radius vector \(\overrightarrow{(r)}\) and the force vector \(\overrightarrow{(\mathbf{f})}\) :
\(\vec{\tau}=\overrightarrow{\mathrm{r}} \times \overrightarrow{\mathrm{f}}\)
This defines the rotational effect of a force applied at a distance from a pivot.
Each component is consistent with the right-hand rule and the classical definitions in rotational dynamics.
See the Complete Solution
Get step-by-step explanations for this and 2.5 Lakh+ more JEE, NEET & CET questions.
- Unlock all solutions
- Practice the full chapter
- Track accuracy across PYQs
4.8 rated on Google Play · 14,000+ reviews
More questions from Physics
- A ray of light travelling through glass of refractive index \(\sqrt{2}\), is incident on glass - air boundary at an angle of incidence \(45^{\circ}\). If refractive index of air is 1 , then the angle of refraction will be \(\left[\sin 45^{\circ}=\frac{1}{\sqrt{2}}, \quad \sin 90^{\circ}=1\right]\)MHT CET 2020 Medium
- The electric potential at the centre of two concentric half rings of radii \(R_1\) and \(R_2\), having same linear charge density ' \(\lambda\) ' is ( \(\varepsilon_0=\) permittivity of free space \()\)
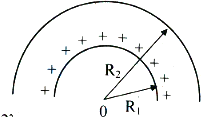 MHT CET 2024 Easy
MHT CET 2024 Easy - An electron of mass ' \(m\) ' and charge ' \(q\) ' is accelerated from rest in a uniform electric field of strength ' \(E\) '. The velocity acquired by the electron when it travels a distance ' \(L\) ' isMHT CET 2021 Easy
- In an \(L-R\) circuit, the inductive reactance is equal to \(\sqrt{3}\) times the resistance ' \(R\) ' of the circuit. An e.m.f. \(E=E_0 \sin (\omega t)\) is applied to the circuit. The power consumed in the circuit isMHT CET 2025 Medium
- The ratio of the acceleration due to gravity on two planets \(\mathrm{P}_1\) and \(\mathrm{P}_2\) is \(\mathrm{K}_1\). The ratio of their respective radii is \(\mathrm{K}_2\). The ratio of their respective escape velocities isMHT CET 2021 Medium
- A carnot engine, whose efficiency is \(40 \%\) takes heat from a source maintained at temperature 600 K . It is desired to have an efficiency \(60 \%\), then the intake temperature for the same exhaust (sink) temperature should beMHT CET 2024 Easy
More PYQs from MHT CET
- Two coherent sources ' \(\mathrm{P}\) ' and ' \(\mathrm{Q}\) ' produce interference at point ' \(\mathrm{A}\) ' on the screen, where there is a dark band which is formed between \(4^{\text {th }}\) and \(5^{\text {th }}\) bright band. Wavelength of light used is \(6000 Å\). The path difference PA and QA isMHT CET 2021 Medium
- \(\int_0^2 \frac{3 x+1}{x^2+4} d x=\)MHT CET 2025 Medium
- Which of the following has least bond energy?MHT CET 2012 Medium
- The length of the latus rectum of an ellipse is and eccentricity is then equation of the ellipse is…MHT CET 2019 Medium
- Which of the following conversions is Hofmann Elimination reaction?MHT CET 2024 Easy
- The equation of the line passing through the point \((1,2,3)\) and perpendicular to the
lines \(\frac{x-1}{1}=\frac{y-2}{2}=\frac{z-3}{3}\) and \(\bar{r}=\lambda(-3 \hat{\imath}+2 \hat{\jmath}+5 \hat{k})\) isMHT CET 2020 Easy